MPC+WBC算法控制框架
该控制框架具备以下特点:
控制框图如下所示:
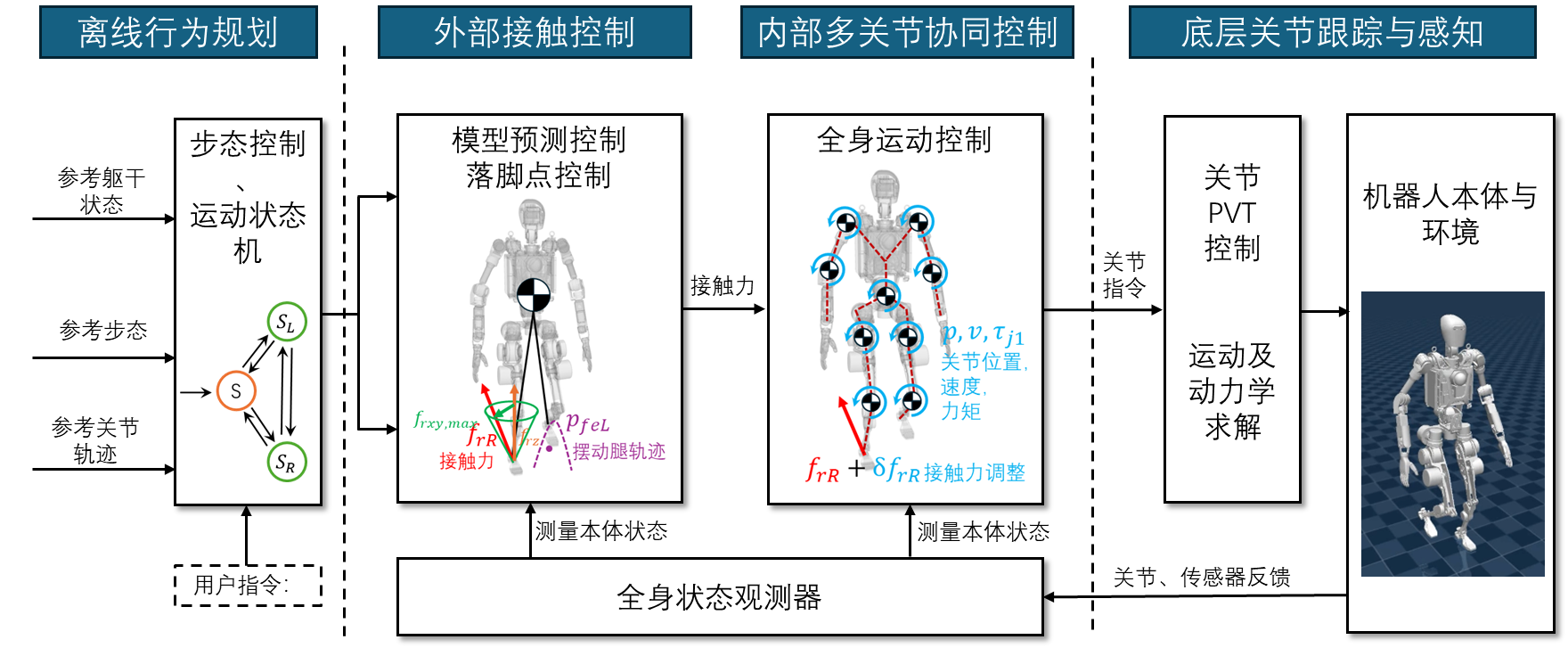
控制框图
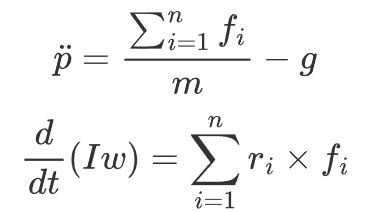
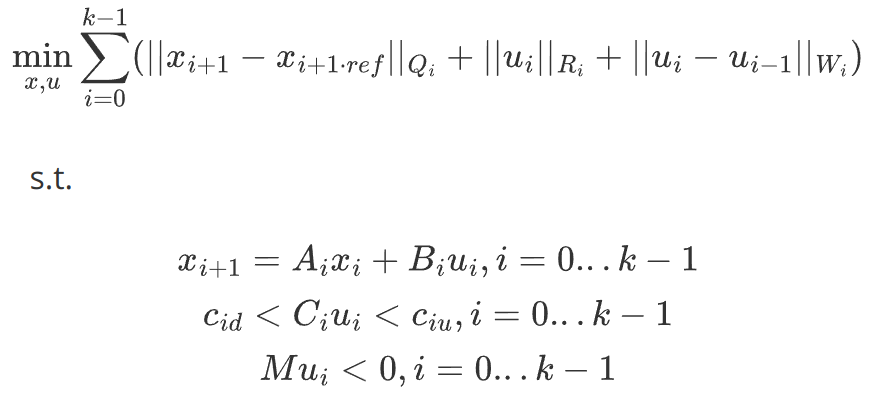
MPC在低频层级运行,基于单刚体模型通过对未来一段时间内对系统模型进行预测,并基于当前系统状态与预测优化生成足底接触力轨迹。
机器人单刚体模型如下所示:
MPC的优化过程如下所示:
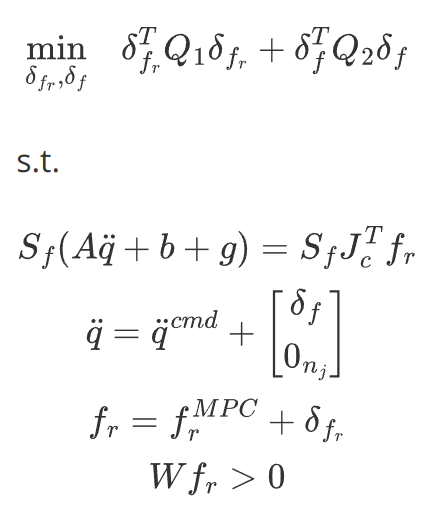
WBC在高频层级运行,通过零空间映射实现机器人全身多关节对于多任务的执行,并基于全身动力学优化最终生成全身关节的位置速度力矩指令。
机器人全维动力学模型如下所示:

WBC的优化过程如下所示:
以上为本控制框架的核心算法,据此实现机器人的多种运动能力。